由于之前做了物体的分割,要用于机械臂的抓取,所以绕不开物体的位姿估计,所以本篇主要讲解的完成分割后如何进行长方体的位姿估计。
由于使用的分割算法是从低层次到高层次,所以在分割的结果蕴含了物体各个面的组成信息,并知道了各个面的大小,当然不知道的情况也可以进行处理,之后会进行相关阐述。
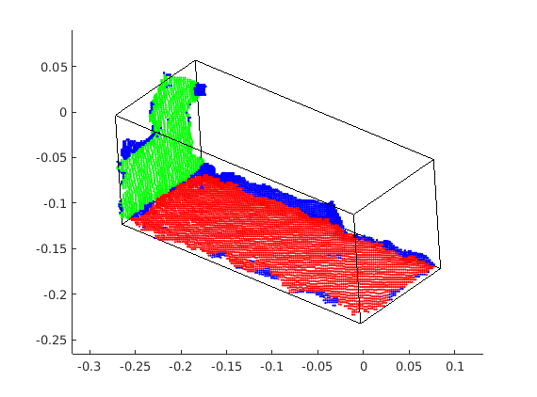
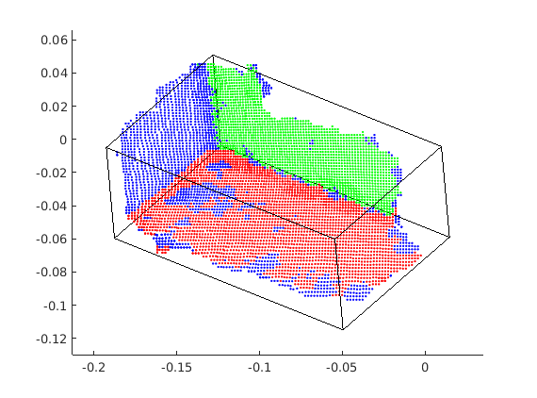
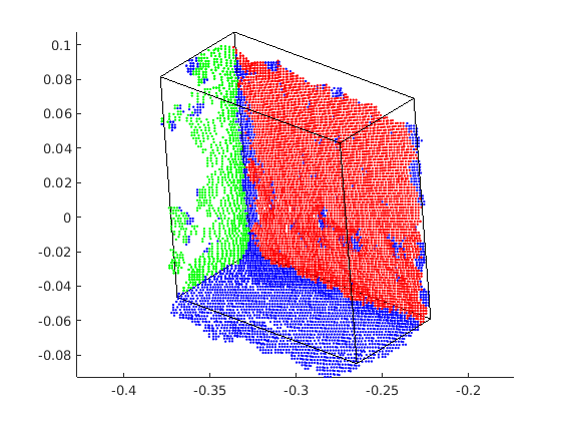
已知物体各个面的组成
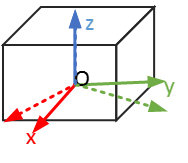
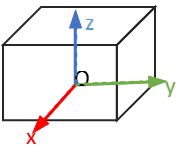
由于已经知道了各个面的组成信息,首先选择最大面,计算得到对应的法向量,使其作为物体的z轴向量,进而选择次大面,计算得到对应的法向量,使其为物体的y轴向量,进而对其进行一系列的旋转平移操作,完成物体的尺寸和位姿变换关系的计算:
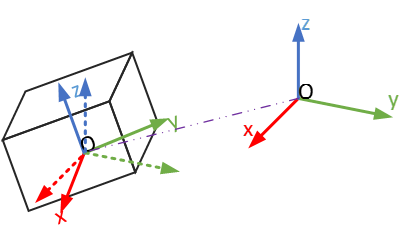
(1)首先计算得到物体z轴与相机坐标系下的z轴夹角为$\theta$,将其在中心点旋转$\theta$使物体中心坐标系下的z轴与相机坐标系的z轴平行;
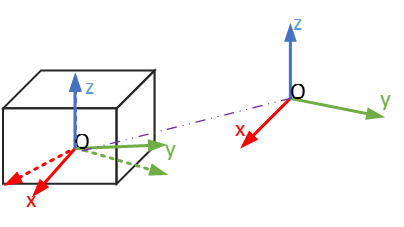
(2)将物体中心平移与相机中心重合;
(3)计算得到物体y轴与相机坐标系下的y轴夹角为$\beta$,将其在中心点旋转$\beta$使物体中心坐标系下的y轴与相机坐标系的y轴重合。
由此可以得到与相机坐标系 $C_c$, 与物体坐标系 $C_o$ 之间的位姿变化关系中平移向量为$T$,旋转矩阵为:
$$R = \begin{bmatrix} \cos\theta & -\sin\theta & 0 \\ \sin\theta & \cos\theta & 0 \\ 0 & 0 & 1\end{bmatrix} \begin{bmatrix} \cos\beta & 0 & -\sin\beta \\ 0 & 1 & 0 \\ \sin\beta & \cos\beta & 0 \end{bmatrix}$$
结果可以得到:
不知道物体各个面的组成
当原始输入的数据不知道对应面的主成分,此时就需要对应的pca来进行最大面的拟合,然后再进行次小面的计算,然后按照上面的方法完成物体的位姿估计即可。
matlab源码要回实验室了再上传到博客,c++上只做了分割后得到结果的位姿估计,matlab上有将一个物体分成多个面然后再进行位姿估计,也用matlab随机生成数据,验证了该方法的正确性,好吧,这当然是正确的,我又too young too simple了。
由于涉及到类成员函数,然后我就只简单的贴一部分实现,有什么问题课题探讨一下。